Gait learning for soft microrobots controlled by light fields
2018
Conference Paper
ics
pf
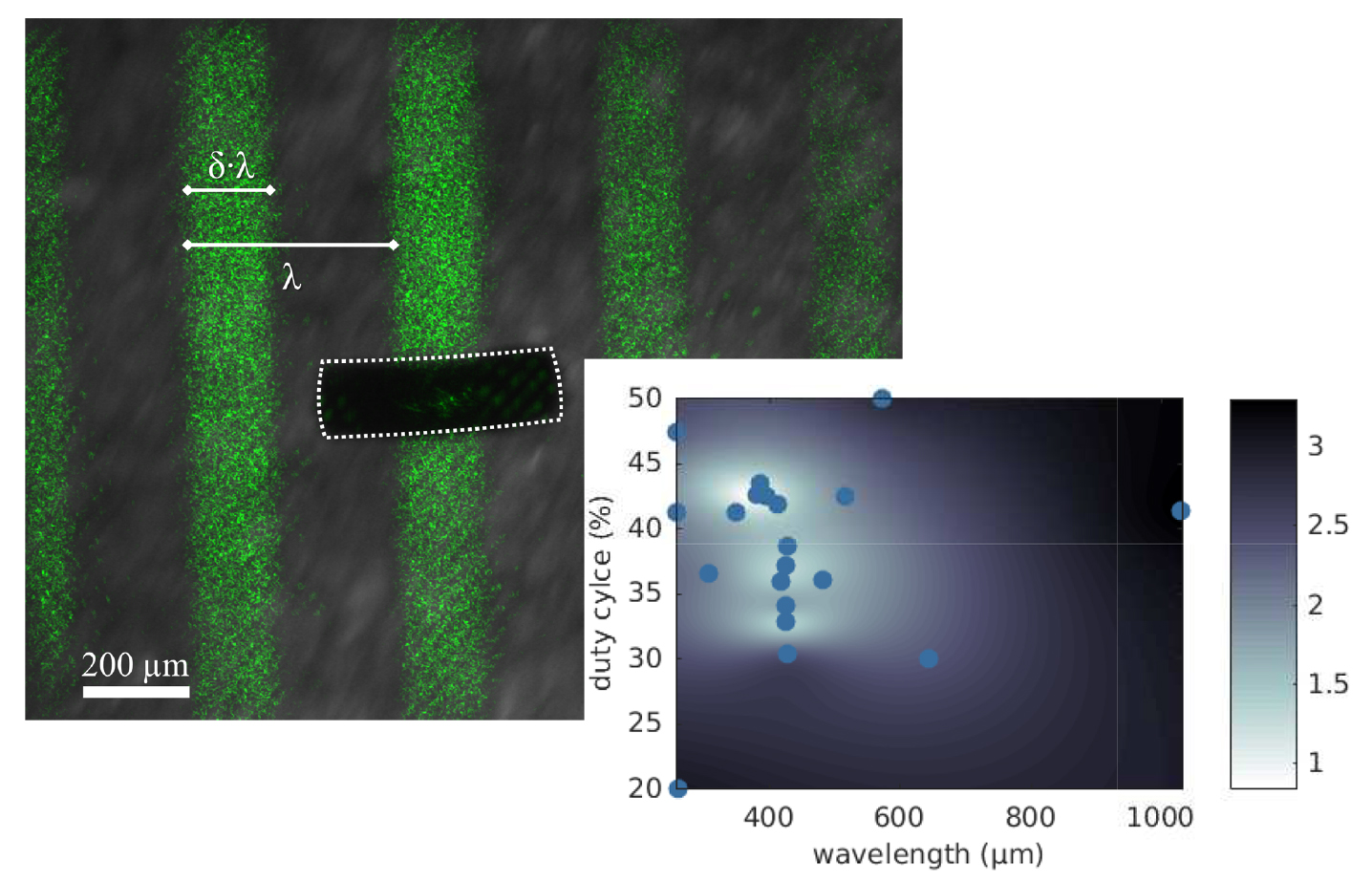
Soft microrobots based on photoresponsive materials and controlled by light fields can generate a variety of different gaits. This inherent flexibility can be exploited to maximize their locomotion performance in a given environment and used to adapt them to changing environments. However, because of the lack of accurate locomotion models, and given the intrinsic variability among microrobots, analytical control design is not possible. Common data-driven approaches, on the other hand, require running prohibitive numbers of experiments and lead to very sample-specific results. Here we propose a probabilistic learning approach for light-controlled soft microrobots based on Bayesian Optimization (BO) and Gaussian Processes (GPs). The proposed approach results in a learning scheme that is highly data-efficient, enabling gait optimization with a limited experimental budget, and robust against differences among microrobot samples. These features are obtained by designing the learning scheme through the comparison of different GP priors and BO settings on a semisynthetic data set. The developed learning scheme is validated in microrobot experiments, resulting in a 115% improvement in a microrobot’s locomotion performance with an experimental budget of only 20 tests. These encouraging results lead the way toward self-adaptive microrobotic systems based on lightcontrolled soft microrobots and probabilistic learning control.
| Author(s): | Alexander von Rohr and Sebastian Trimpe and Alonso Marco and Peer Fischer and Stefano Palagi |
| Book Title: | International Conference on Intelligent Robots and Systems (IROS) 2018 |
| Pages: | 6199-6206 |
| Year: | 2018 |
| Month: | October |
| Department(s): | Intelligent Control Systems, Micro, Nano, and Molecular Systems |
| Research Project(s): |
Adaptive Locomotion of Soft Microrobots
Controller Learning using Bayesian Optimization |
| Bibtex Type: | Conference Paper (inproceedings) |
| Paper Type: | Conference |
| DOI: | 10.1109/IROS.2018.8594092 |
| Event Name: | International Conference on Intelligent Robots and Systems 2018 |
| Event Place: | Madrid, Spain |
| Address: | Piscataway, NJ, USA |
| State: | Published |
| URL: | https://ieeexplore.ieee.org/document/8594092 |
| Links: |
arXiv
IEEE Xplore |
|
BibTex @inproceedings{2018vonrohr,
title = {Gait learning for soft microrobots controlled by light fields},
author = {von Rohr, Alexander and Trimpe, Sebastian and Marco, Alonso and Fischer, Peer and Palagi, Stefano},
booktitle = {International Conference on Intelligent Robots and Systems (IROS) 2018},
pages = {6199-6206},
address = {Piscataway, NJ, USA},
month = oct,
year = {2018},
doi = {10.1109/IROS.2018.8594092},
url = {https://ieeexplore.ieee.org/document/8594092},
month_numeric = {10}
}
|
|